DREAM for Protection of Airspace
– Mohammed Asheruddin
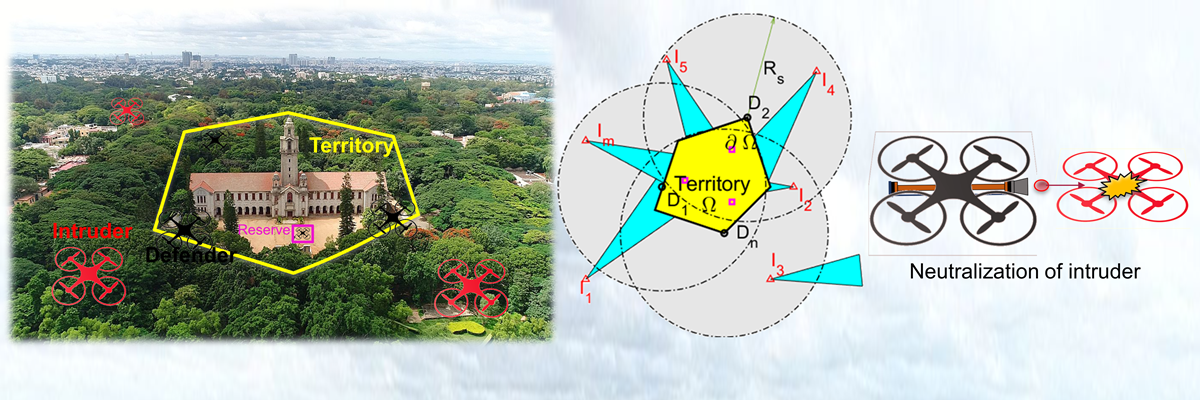
Unmanned aerial vehicles, better known as drones, are now commonly used in defence, surveillance, and other domestic activities. However, a foreign or unidentified drone could potentially breach the privacy and security of a protected place or facility.
To safeguard such critical airspace and infrastructure, researchers resort to game theory – mathematical modelling of strategic interactions among a set of players. The players who try to intrude into the region are called intruders and other players who monitor the region and capture intruders while operating within the territory are referred to as defenders. However, a defender can only neutralise a single homogeneous intruder moving with constant speed in a convex territorial space. But in a real-life scenario, intruders are more likely to be heterogeneous (moving at varying speeds in more than one direction) within a complex territorial space.
Suresh Sundaram, Associate Professor in the Department of Aerospace Engineering, IISc, and his group have now developed a novel approach called DREAM (Dynamic REsource Allocation with decentralised Multi-task assignment) to address these limitations. DREAM can tackle heterogeneous intruders, including sudden intruder pop-ups. In addition, spatio-temporal multi-task assignments with an online computed dynamic-sized team of defenders ensure that fewer defenders are utilised against the larger number of intruders.
DREAM has several advantages compared to conventional game theory models: it is more efficient, is simpler, has a superior success rate, is better at using resources, is readily scalable and is online computable. The authors plan to focus on extending DREAM to three-dimensional problems with constrained navigational space in hard-to-observe regions. These theoretical ideas will be applied in ongoing the anti-drone project for protecting the restricted airspace.
REFERENCE:
Velhal, Shridhar, Suresh Sundaram, and Narasimhan Sundararajan, “Dynamic Resource Allocation with Decentralized Multi-task Assignments (DREAM) Approach for Perimeter Defense Problem,” IEEE Transactions on Aerospace and Electronic Systems, doi: 10.1109/TAES.2022.3147742.
Velhal, Shridhar, Suresh Sundaram, and NarasimhanSundararajan, “A Decentralized Multirobot Spatiotemporal Multitask Assignment Approach for Perimeter Defense,” IEEE Transactions on Robotics,doi: 10.1109/TRO.2022.3158198
LAB WEBSITE:
Artificial Intelligence and Robotics Lab, AE 204, Department of aerospace engineering, IISc
http://aero.iisc.ac.in/people/suresh-sundaram/


